Однозонний тиристорний електропривод постійного струму
|
Скачати 46.83 Kb.
|
|
| Дата конвертації | 01.04.2019 |
| Розмір | 46.83 Kb. |
| Тип | курсова робота |
|
|
-
Навігація по даній сторінці:
- Однозонний тиристорний електропривод постійного струму
- ВИХІДНІ ДАНІ
- 2 ФУНКЦІОНАЛЬНА СХЕМА ЕЛЕКТРОПРИВОДА
|
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ Державна освітня установа вищої І фундаментальну наукову освіту Нижегородському державному технічний університет Кафедра Електропривод і автоматизація промислових установок Завідуючий кафедри Хватів С.В. (Підпис) (прізвище. І. О.) (дата) Однозонний тиристорний електропривод постійного струмузі зворотним зв'язком по ЕРС і стабілізацією струму збудження двигуна(найменування теми проекту або роботи) ПОЯСНЮВАЛЬНА ЗАПИСКА до курсового проекту (вид документа) варіант 2.7 (номер варіанта) КЕРІВНИК Соколов В.В. (Підпис) (прізвище. І. О.) (дата) СТУДЕНТ Кірасирів Д.В. (Підпис) (прізвище. І. О.) 04-ЕПА (дата) (група або шифр) Проект захищений (дата) протокол № З оцінкою Нижній Новгород 2008 р ЗМІСТ Вступ 1. Вибір основного обладнання 2. Функціональна схема електроприводу 3. Розрахунок параметрів силового ланцюга електроприводу 4. Розрахунок запасу по напрузі 5. Розрахунок параметрів регулятора струму якоря і ЕРС 6. Розрахунок параметрів регулятора струму збудження 7. Розрахунок швидкісних характеристик і їх статизму в розімкнутої і замкнутої системі електроприводу 8. Розрахунок величини динамічного падіння швидкості двигуна при набиранні моменту навантаження 9. Оцінка впливу внутрішнього зворотного зв'язку по ЕРС на процеси, що протікають в контурі струму 10. Дослідження динамічних процесів в контурі струму якоря і ЕРС на цифровий моделі перелік елементів ВИХІДНІ ДАНІТип двигуна: П132-4К; Номінальна потужність: Р н = 75 кВт; Номінальна напруга: U н = 220 В; Номінальний струм: I н = 385 А; Номінальна частота обертання: n н = 300 об / хв; Момент інерції: J м = 100 кгм 2; Передавальне відношення редуктора: До р = 5; Тип ЕП: реверсивний. дані електродвигуна Номінальна потужність: Р н = 75 кВт; Номінальна напруга: U н = 220 В; Номінальний струм: I н = 385 А; Номінальна частота обертання: n н = 300 об / хв; Максимальна частота обертання: n МАКС = 1500 об / хв; Максимальний струм: I max = 2,5I н; Маховою момент: GD 2 = 73 кгм 2; Число полюсів: 2р = 4; Число витків обмотки якоря: w я = 135; Опір обмотки якоря при 20 ° С: R я = 0,025 Ом; Число паралельних гілок обмотки якоря: 2а = 2; Опір додаткових полюсів при 20 ° С: R дп = 0,004 Ом; Число витків на полюс: w в = 639; Опір обмотки головних полюсів: R ів = 12 Ом; ВСТУП Метою даного курсової роботи є розробка однозонного реверсивного тиристорного електроприводу постійного струму зі зворотним зв'язком по ЕРС і стабілізацією струму збудження двигуна. Даний електропривод постійного струму розробляється на основі комплектного тиристорного електроприводу ЕПП. Застосування тиристорного електроприводу дозволяє оптимізувати його роботу на відпрацювання необхідних технологічних операцій. У цій роботі необхідно стабілізувати швидкість обертання електродвигуна за допомогою зворотного зв'язку по ЕРС і стабілізації струму збудження двигуна. Це здійснюється шляхом знаходження необхідних регуляторів і розрахунку їх параметрів. Тиристорний перетворювач: ЕПП 1М 46 27 Е УХЛ4 Модифікація по випрямлення напруги блоку управління (115 В) Напруга живильної мережі (380 В, 50 Гц) Функціональна характеристика (однозонний, головного руху зі зворотним зв'язком по ЕРС) Кліматичне виконання
Силовий трансформатор,: Тип: ТСЗП-200 / 0,7; Напруга мережевий обмотки: U 1 = 0,38 кВ; Фазна напруга вентильної обмотки: U 2ф = 117 В; Напруга короткого замикання: DU к = 5,2%; Втрати короткого замикання: DР кз = 2960 Вт; Номінальний випрямлений струм I d н = 500 А. Згладжує дросель: Тип: ФРОС-125 / 0,5; Індуктивність: L сд = 0,75 мГн; Втрати в міді при номінальному випрямленном струмі: DР сд = 960 Вт. шунт: Шунт в ланцюзі якоря вибираємо з умови, щоб його номінальний струм був не менший номінального струму двигуна. Номінальний струм двигуна I н = 385 А, т. О. вибираю шунт типу 75 ШСМ на номінальний струм I шня = 500 А і номінальну напругу U шн = 75 мВ. Задатчик регульованої величини: Як задатчик швидкості вибираємо потенціометр типу ППБ - 15 -1000 Ом. Т.к U п = ± 15 В, а U з (max) = 10 В, послідовно необхідно включити додатковий резистор, R доб = 500 Ом, на якому буде погашено зайве напруження. До складу електроприводу входить: - блок керування, - електродвигун, - трансформатор, - згладжує реактор, - джерело живлення обмотки збудження, - блок введення (для підключення збудника до мережі). Електропривод виконаний з примусовим охолодженням, захист перетворювача проводиться автоматичними вимикачами. Обмотка збудження підключається до двох фаз вторинної силовий обмотки трансформатора. Тиристорний перетворювач збудника ТПВ виконаний за однофазною мостовою схемою. Управління тиристорами ТПЯ проводиться від трехканальной СІФУ, що містить формувачі імпульсів ФІ1-фіз. Введення керуючого сигналу в СІФУ, регулювання кутів і їх обмеження здійснюється за допомогою змінних резисторів в керуючому органі (УО) СІФУ. Перемикання імпульсів управління в перетворювачі ТПЯ проводиться блоком логічного пристрою ЛУ, яке працює у функції сигналу заданого напрямку струму і вихідного сигналу датчика провідності вентилів ДП. Струмообмеження забезпечується за рахунок обмеження вихідної напруги регулятора ЕРС. При цьому виключення кидків струму здійснюється за рахунок обмеження вихідної напруги регулятора струму. 2 ФУНКЦІОНАЛЬНА СХЕМА ЕЛЕКТРОПРИВОДАДана система з регулюванням швидкості і стабілізацією струму збудження побудована за принципом підлеглого регулювання і має два контури регулювання: внутрішній контур струму якоря і зовнішній контур ЕРС, а також незалежний контур струму збудження. У внутрішній контур струму якоря входять: регулятор струму якоря, вентильний перетворювач якоря двигуна ВПЯ, якірний ланцюг двигуна і датчик струму якоря. Зовнішній контур ЕРС складається з регулятора ЕРС, замкнутого контуру струму якоря, механічного ланцюга двигуна і датчика напруги. У даній системі існує два способи обмеження струму якоря двигуна: шляхом обмеження вихідного сигналу регулятора ЕРС, який є задає сигналом на струм, і за рахунок "струмового стінки", реалізованої в ЕПП. Розглядаючи роботу системи при набиранні моменту навантаження. Припускаємо, що двигун пускався на холостому ходу і до моменту накидання навантаження вийшов на задану швидкість. На вході регуляторів струму і ЕРС нулі. Після появи моменту навантаження по якоря починає протікати статичний струм, а швидкість двигуна починає зменшуватися. В результаті на вході регулятора ЕРС виникає сигнал неузгодженості позитивного знака, а на вхід регулятора струму подається негативний сигнал зворотного зв'язку по струму. У міру зменшення швидкості зростає неузгодженість на вході регулятора ЕРС і пропорційно зростає вихідний сигнал регулятора, який компенсує сигнал негативного зворотного зв'язку по струму. В деякий момент часу швидкість зменшується до тієї величини, при якій сигнал на вході регулятора струму ставати рівним нулю. Це момент закінчення перехідного процесу. Система входить в усталений режим з деякою помилкою по швидкості.
Малюнок 2.1 - Функціональна схема електроприводу 3 РОЗРАХУНОК ПАРАМЕТРІВ СИЛОВОЙ ЦЕПИ ЕЛЕКТРОПРИВОДА Падіння напруги на щітковому контакті приймаємо рівним DU щ = 2 В. Номінальна кутова швидкість
Опір якірного ланцюга електродвигуна
де β т - коефіцієнт, що враховує зміну опору обмоток при нагріванні на 60 ° С, β т = 1.24. Номінальна ЕРС електродвигуна
Конструктивний коефіцієнт електродвигуна
де 2а - число паралельних гілок, 2а = 2; 2р - число полюсів, 2р = 4. Коефіцієнт ЕРС і моменту електродвигуна
номінальний потік
Опір обмотки збудження при температурі 80 ° С
Коефіцієнт нахилу кривої намагнічування при Ф = Ф н
де Індуктивність обмотки збудження
Електромагнітна постійна часу ланцюга збудження
Постійна часу контуру вихрових струмів
Індуктивність якоря двигуна
де Електромагнітна постійна часу якоря електродвигуна
Момент інерції двигуна
Момент інерції механізму, приведений до валу електродвигуна
Момент інерції приводу
Номінальний момент електродвигуна
Максимальне прискорення електродвигуна під час пуску від задатчика інтенсивності
при М дин = М н. Наведене до ланцюга випрямленого струму опір трансформатора
Максимальна випрямлена ЕРС перетворювача ланцюга якоря
де k Сх1 = 2.34 - коефіцієнт трифазної мостової схеми випрямлення. Індуктивний опір трансформатора, наведене до ланцюга вторинної обмотки
де k сх2 = 0,815 - для трифазної мостової схеми випрямлення. Еквівалентний опір трансформатора, що враховує зниження випрямленої напруги при комутації вентиля
Опір згладжує дроселя
Опір шин і кабелів
Опір ланцюга ТП - якір двигуна
Індуктивність розсіювання трансформатора
Індуктивність ланцюга ТП - електродвигун
Максимальне значення коефіцієнта посилення ТП в ланцюзі якоря з СІФУ, виконаної за вертикальним принципом управління з пилкоподібною напругою порівняння
де U оп - амплітуда опорного напруги в СІФУ, U оп = 10 В. Електромагнітна постійна часу ланцюга ТП - електродвигун
Електромеханічна постійна часу
Передавальний коефіцієнт шунта в ланцюзі якоря
Коефіцієнт підсилювача датчика струму якоря
Коефіцієнт передачі підсилювача датчика струму якоря
де U ДТ max - максимально допустиме значення напруги на виході датчика струму, U ДТ max = 10 В. Шунт в ланцюзі збудження вибираю по номінальному струмі збудження електродвигуна. Вибираємо шунт на ток I ншв = 15 А. Передавальний коефіцієнт шунта в ланцюзі збудження
Коефіцієнт підсилювача датчика струму в ланцюзі збудження Напруга датчика струму збудження приймаю 4,5 В, тоді
Коефіцієнт передачі підсилювача датчика струму якоря
Чи не компенсувати постійні часу контурів струму якоря і струму збудження приймемо Т m = 0.005 с; Т m в = 0.04 с. 4 РОЗРАХУНОК ЗАПАСУ по напрузі Визначаємо необхідний запас по напрузі
де де E дн - номінальна ЕРС двигуна. E дн = 204 В, ΔE ДЗАП = max {ΔE d стат; ΔE d дин} (4.3) ΔE d стат = I max ∙ R е = 2.5 ∙ 385 · 0.069 = 66.6 В. (4.4)
Визначаю фактичний коефіцієнт запасу
Гранична величина ЕРС, до якої буде здійснюватися настройка контуру на модульний оптимум E dпред = E doя - DE dзап = 273.1 - 124.9 = 144.1 В. (4.7) Гранична ЕРС двигуна при зниженні напруги мережі живлення на 10% E dпред = E doя - DE dзап = 0.9 ∙ 273.1 - 124.9 = 117.2 В. (4.7)
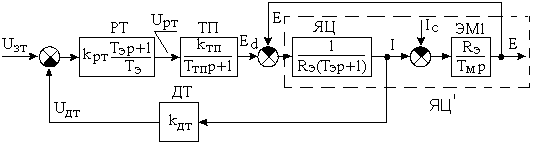
За отриманого значення слід, що настройка на модульний оптимум буде виконуватися в досить великому діапазоні швидкостей. 5 РОЗРАХУНОК ПАРАМЕТРІВ РЕГУЛЯТОРОВ СТРУМУ ЯКОРЯ І ЕРС Оптимізацію системи, побудованої за принципом підлеглого регулювання, починаємо з внутрішнього контуру струму якоря. 5.1 Контур струму якоря 5.1.1 Оптимізація контуру струму якоря
РТ - регулятор струму; ТП - тиристорний перетворювач якоря двигуна; ЯЦ - якірний ланцюг двигуна; ДТ - датчик струму. Малюнок 5.1 - Структурна схема контуру струму якоря Оптимізацію проводимо при припущеннях: 1) датчик струму вважаємо без інерційним
2) все малі інерційності, які має контур, включені на вході ТП:
3) ЕД загальмований (Е = 0) або (DЕ »0), а значить відсутня ОС по ЕРС. Оптимізуємо контур струму на модульний оптимум
тоді
де Отримали пропорційно-інтегральний регулятор (ПІ - регулятор) струму. Передавальна функція замкнутого контуру струму має вигляд
Т. к. Величина Т m мала, то складовою
де Т т = 2 ∙ Т μ - еквівалентна постійна часу налаштованого на модульний оптимум контуру струму. Структурна схема замкнутого контуру струму має вигляд:
Малюнок 5.2 - Структурна схема замкнутого контуру струму 5.1.2 Розрахунок параметрів регулятора струму якоря
Малюнок 5.3 - Регулятор струму якоря Коефіцієнт регулятора струму
Задаємося величиною ємності конденсатора в колі зворотного зв'язку операційного підсилювача регулятора струму Опір резистора в колі зворотного зв'язку операційного підсилювача регулятора струму
Ом. (5.1.2.2) Опір в ланцюзі датчика струму
Щоб в сталому режимі сигнал РТ не змінювався, потрібно, щоб вхідний струм не надходив в канал ОС.
Коефіцієнт підсилювача датчика струму якоря визначений в розділі 3. Приймаємо R 1 = 5 кОм, тоді R 2 = R 1 ∙ k удтя = 5 ∙ 66.6 = 333 кОм. (5.1.2.5) 5.2 Контур ЕРС 5.2.1 Оптимізація контуру ЕРС
ЗКТ - замкнутий контур струму; ЕМ - електромеханічна частина двигуна; ДЕ - датчик ЕРС. Т Яц - постійна часу якірного ланцюга двигуна, з якої знімається сигнал зворотного зв'язку по ЕРС. Малюнок 5.4 - Структурна схема контуру ЕРС допущення: Ic = 0 (Х.Х.) У контурі є дві ланки з малими постійними часу, які включені послідовно і тому можуть бути перетворені до одного ланці з малою постійною часу, що дорівнює їх сумі
де Т m е - мала постійна часу контуру ЕРС, c. Т m е = Т т + Т Яц ¢ (5.2.1.2) Передавальна функція розімкнутого контуру ЕРС, налаштованого на модульний оптимум
звідки
Отримав пропорційний регулятор (П-регулятор) ЕРС. З таким регулятором система буде астатічной за завданням (при відсутності впливу, що обурює) і статичної по обуренню. Передавальна функція замкнутого контуру ЕРС
Таким чином, в замкнутій передавальної функції контуру ЕРС присутній форсує ланка. Через наявність інерційності в датчику ЕРС перехідний процес буде йти з великим перерегулюванням. Для зменшення перерегулювання на вхід системи включаю фільтр з постійною часу, рівний інерційності датчика. Передавальна функція фільтра
Структурна схема замкнутого контуру ЕРС має вигляд:
Малюнок 5.6 - Структурна схема замкнутого контуру ЕРС 5.2.2 Розрахунок параметрів регулятора ЕРС із застосуванням датчика напруги
Малюнок 5.7 - Регулятор ЕРС Коефіцієнт датчика напруги
Коефіцієнт передачі регулятора ЕРС
Задаємося ємністю в ланцюзі датчика напруги З дн = 1 мкФ. Опір в ланцюзі датчика напруги:
Опір в колі зворотного зв'язку операційного підсилювача регулятора напруги: R ое = k ре × R дн = 0.547 × Опір в ланцюзі завдання ЕРС знаходимо з умов сталого режиму:
R зе = R дн = 129.3 кОм. (5.2.2.6) Ємність фільтра в ланцюзі визначаємо з умови
При R зе = R дн З ф = З дн = 1 мкФ. Опір резистора струмового компенсації знаходимо з умов режиму стопоріння двигуна: Е д = 0, U Де = 0.
U дт = I × k дт, U дн = U д × k дн = I × R a × k дн,
Опору резисторів дільника
Обмеження вихідного сигналу регулятора ЕРС здійснюється двома зустрічно включеними стабілітронами VD1 і VD2. Оскільки вихідний сигнал регулятора ЕРС є сигналом завдання на струм, то його обмеження призводить до обмеження струму двигуна на рівні максимально допустимого. Падіння напруги на стабілітронах приймаємо ΔU ст = 1 В, максимально допустима напруга завдання на струм U зт max = 10 В. Тоді напруга на стабілітронах буде рівним U VD 1 = U VD 2 = U зт max - ΔU ст = 10 -
6 РОЗРАХУНОК ПАРАМЕТРІВ РЕГУЛЯТОРА СТРУМУ ПОРУШЕННЯ 6.1 Оптимізація контуру струму збудження Так як привід однозонний, то оптимізацію контуру струму збудження проводимо для точки Ф н.
РТВ - регулятор струму збудження; ТПВ - тиристорний перетворювач обмотки збудження; ОВ - електричний ланцюг обмотки збудження; МЦ - магнітна ланцюг обмотки збудження; ДТВ - датчик струму збудження. Малюнок 6.1 - Структурна схема контуру струму збудження Проводимо оптимізацію контуру струму на модульний оптимум. Для розімкнутої системи:
Передавальна функція регулятора струму збудження
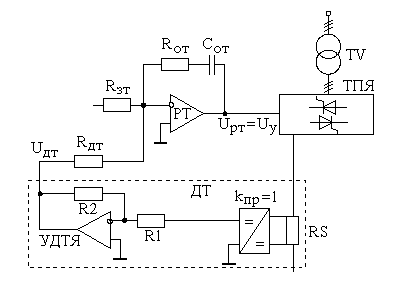
де k ртв - коефіцієнт регулятора струму. Отримуємо пропорційно-інтегральний регулятор (ПІ-регулятор) контуру струму збудження. 6.2 Розрахунок параметрів регулятора струму збудження
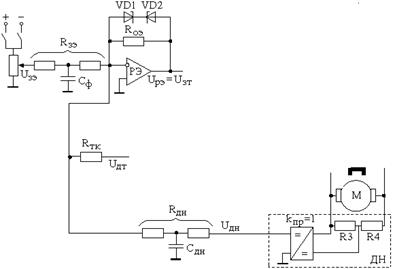
Малюнок 6.2 - Принципова схема стабілізації струму збудження Коефіцієнт тиристорного перетворювача кола збудження
де E d 0В - максимальна випрямлена ЕРС перетворювача ланцюга збудження; α - номінальний кут управління перетворювача.
Визначаємо коефіцієнт регулятора струму збудження
де T ВΣ - електромагнітна постійна часу. T ВΣ = T в + T вт = 0.624 + 0.062 = 0.686. (6.2.7) Задаюся величиною ємності конденсатора в ланцюзі датчика струму збудження C ДТВ = 5 мкФ. Визначаю опір датчика струму збудження
Визначаємо опір зворотного зв'язку регулятора струму збудження R відп = k ртв ∙ R ДТВ = Опір резистора в ланцюзі задатчика струму збудження
Задаємося опором R 5 = 5 кОм. Знаходимо опір R 6
7 РОЗРАХУНОК ШВИДКІСНИХ ХАРАКТЕРИСТИК ТА ЇХ статизм В розімкнути І замкнутої системи ЕЛЕКТРОПРИВОДА Механічні характеристики двигуна постійного струму лінійні, тому їх побудова виробляю по двох точках, відповідним режимам холостого ходу і номінального навантаження. Вираз для розрахунку механічних характеристик має вигляд Ω = Ω 0 - Δ Ω, (7.1) де Ω 0 - кутова швидкість ідеального холостого ходу.
Падіння швидкості при номінальному навантаженні на природній характеристиці
Падіння швидкості при номінальному навантаженні в розімкнутої системі
Падіння швидкості при номінальному навантаженні в замкнутій системі
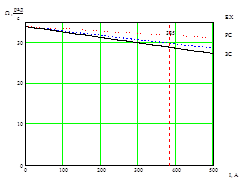
Малюнок 7.1 - Швидкісні характеристики електроприводу Статізм природної характеристики
Статізм характеристики розімкнутої системи
Статізм характеристики замкнутої системи
Напруга завдання на швидкість холостого ходу W про U ЗС1 = W про × k дн × C e × Ф н = 33.9 × 0.045 × 85.94 × 0.076 = 10 В. (7.9) Напруга завдання на швидкість холостого ходу W = 0,7 ∙ W про на штучній механічної характеристиці при зниженій напрузі U ЗС2 = 0,7 × W про × k дн × C e × Ф н = 0.7 × 33.9 × 0.045 × 85.94 × 0.076 = 7 В. (7.10) З отриманих графіків механічних характеристик можна сказати, що природна характеристика найжорсткіша, характеристика розімкнутої системи м'якша, ніж природна, а характеристика замкнутої системи - сама м'яка. Велика м'якість механічної характеристики - недолік замкнутої системи, але в той же час система налаштована на модульний оптимум і перехідні процеси йтимуть з малим (4,3%) перерегулюванням і досить високим (8,4Т m) швидкодією. При наявність датчика ЕРС, маючи відповідну обв'язку цього датчика, можна в певному частотному діапазоні компенсувати інерційність датчика, що дозволить підвищити жорсткість механічної характеристики. 8 РОЗРАХУНОК ВЕЛИЧИНИ ДИНАМІЧНОГО ПАДІННЯ ШВИДКОСТІ ДВИГУНА ПРИ накинувся МОМЕНТУ НАВАНТАЖЕННЯ
Малюнок 8.1 - Структурна схема контуру струму якоря по обуренню Знаходимо передавальну функцію замкнутого контуру ЕРС по обуренню
Усталеною режим:
Структурна схема замкнутого контуру ЕРС має вигляд:
Малюнок 8.2 - Структурна схема замкнутого контуру ЕРС Падіння швидкості в розімкнутої системі по Лапласа має вигляд
Отже, падіння швидкості в замкнутій системі в операторної формі запишеться
Скористаємося програмою Maht Cad для переходу від зображення до оригіналу, падіння швидкості в замкнутій системі запишеться
На малюнку представлена крива зміни падіння швидкості DW в функції часу t, що отримується перерахунком кривої зміни відносного падіння швидкості dn = DW / DW Iн ЗС у функції відносного часу t = t / T m е. Параметри перехідного процесу відповідають налаштування на модульний оптимум.
Малюнок 8.3 - Крива зміна швидкості при набиранні моменту Перехідний процес йде з перерегулюванням 4,3% і швидкодією 8,4Т m. 9 ОЦІНКА ВПЛИВУ ВНУТРІШНЬОГО ЗВОРОТНОГО ЗВ'ЯЗКУ ПО ЕРС До процесів, які В КОНТУРІ СТРУМУ
Рисунок 9.1 - Структурна схема контуру регулювання струму якоря з урахуванням дії внутрішнього зворотного зв'язку по ЕРС. При дослідженні вважаємо, що навантаження на валу немає, тобто I c = 0. Передавальна функція ланки якірного ланцюга з урахуванням впливу внутрішнього зворотного зв'язку по ЕРС
Передавальна функція ланки якірного ланцюга в даному випадку має диференціюючими властивостями, отже, компенсує інтегральні властивості регулятора. Визначаю передавальну функцію розімкнутого контуру струму з урахуванням дії внутрішнього зворотного зв'язку по ЕРС і регулятором, розрахованим на режим загальмованого двигуна
(9.1) (9.2) Передавальний функцію замкнутого контуру струму з урахуванням дії внутрішнього зворотного зв'язку по ЕРС:
(9.3) У сталому режимі:
У контурі струму без урахування дії внутрішнього зворотного зв'язку по ЕРС Структурна схема.
Малюнок 9.2 - Структурна схема
де
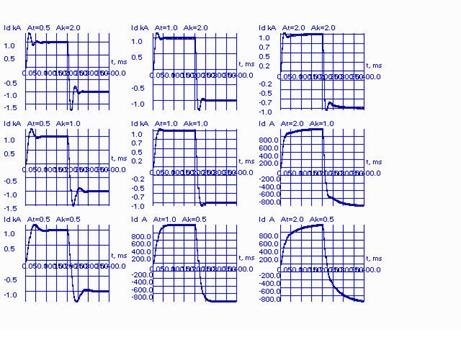
Контур струму, який з ПІ-регулятором був астатическим при загальмованому роторі, стає статичним в перехідному режимі (DЕ ¹ 0). Помилка регулювання тим більше, чим менше постійна часу Т м. Інший наслідок впливу ОС по ЕРС це збільшене перерегулирование. По відношенню до нового сталому рівню струму перерегулирование збільшується, але за абсолютною величиною залишається тим же. Якщо ЕП має велику Т м, то за час виходу струму на заданий рівень ЕРС електродвигуна практично не змінюється і її вплив на струм мінімально. В ЕП з високомоментними ЕД, де Т м мала, вплив внутрішньої ОС по ЕРС істотно, що іноді доводиться враховувати зміною передавальної функції регулятора. Для компенсації дії внутрішнього зворотного зв'язку по ЕРС іноді застосовують більш складний регулятор, наприклад, (ПІ) 2 - типу. 10 ДОСЛІДЖЕННЯ ДИНАМІЧНИХ ПРОЦЕСІВ В КОНТУРІ СТРУМУ ЯКОРЯ І ЕРС НА ЦИФРОВИЙ МОДЕЛІ 10.1 Контур струму Динамічний струм I дин = 0.5 ∙ I н = 0.5 ∙ 385 = 192,5 А. Статичний струм I з = 0.6 ∙ I н = 0.6 ∙ 385 = 231 А. З пункту 7: - напруга завдання на швидкість холостого ходу W про U ЗС1 = 10 В. - напруга завдання на швидкість холостого ходу W = 0,7 ∙ W про U ЗС2 = 7 В.
Малюнок 10.1 - Дослідження настройки контуру струму На малюнку 10.1 представлені 9 графіків перехідних процесів. Графіки розташовані зліва направо по зростанню постійної часу регулятора, і зверху вниз по зменшенню коефіцієнта передачі регулятора k Р. На центральному графіку - перехідний процес при налаштуванні системи на модульний оптимум. Як видно з графіків, при збільшенні постійної часу регулятора зменшується коливальність перехідного процесу, а при зменшенні коефіцієнта передачі регулятора зменшується перерегулювання. Оптимальний перехідний процес спостерігається в системі, налаштованої на модульний оптимум. Його параметри: тривалість процесу 8,4Т μ, перерегулирование 4,3%.
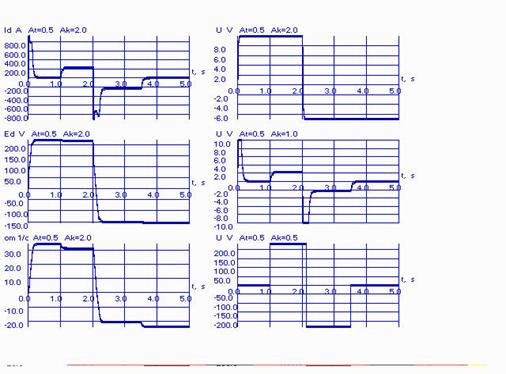
Малюнок 10.2 - Дослідження контуру струму На малюнку 10.2 представлені перехідні процеси в контурі струму. Як видно з графіка, процеси носять апериодический характер, струм виходить на максимальний рівень відповідно до сигналом завдання з перерегулюванням приблизно 4%, причому при реверсі абсолютна величина перерегулювання більше в 2 рази, ніж при пуску, оскільки більше фактичне завдання на струм: при пуску фактичне завдання з 0 на I ст, а при реверсі з I ст на -I ст, т. е. 2 I ст - в 2 рази більше. 10.2 Контур ЕРС
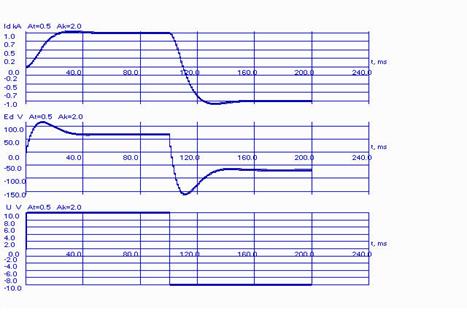
Малюнок 10.3 - Осцилограми перехідних процесів в контурі ЕРС На малюнку 10.3 наведено криві струму і швидкості двигуна. При розгоні на холостому ходу, без задатчика інтенсивності, по якоря двигуна протікає динамічний струм досить великий величини, йде розгін двигуна. Після виходу двигуна на сталу швидкість, струм в якорі спадає практично до нуля, тому що розгін закінчено і динамічний струм дорівнює нулю, а момент навантаження ще не накинутий і, отже, статичний струм дорівнює нулю. При набиранні моменту навантаження по якоря двигуна починає протікати статичний струм, а швидкість двигуна зменшується на деяку величину ΔΩ, відповідну падіння швидкості при даному навантаженні, що показує, що система статична по обуренню. Під час реверсу ток в двигуні збільшується за рахунок кидка динамічного струму і одночасно змінює свій напрямок. Коли перехідний процес реверсу закінчується, ток в двигуні спадає до статичного значення, а при знятті навантаження - зменшується до нуля. В останньому випадку швидкість двигуна збільшується на величину падіння швидкості при набиранні навантаження ΔΩ.Далі йде процес гальмування на холостому ходу, при цьому швидкість двигуна зменшується до нуля, а в якорі двигуна виникає динамічний струм, який забезпечує перехідний процес гальмування. П-регулятор ЕРС із застосуванням задатчика інтенсивності.
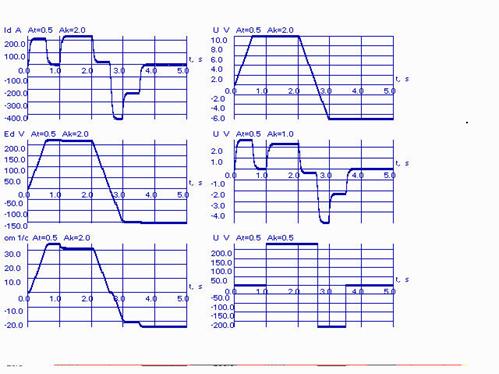
Малюнок 4 - Осцилограми перехідних процесів в контурі ЕРС з задатчиком інтенсивності В системі з задатчиком інтенсивності криві перехідного процесу якісного мають той же вигляд, але більш розтягнуті в часі, оскільки задатчик інтенсивності обмежує на заданому рівні динамічний струм, який зумовлює прискорення. ЛІТЕРАТУРА 1 Методичні вказівки до курсового проекту з дисципліни ²Сістеми управління електропріводамі.² / ДПІ. 1983р. 2 Довідник по електричним машинам / За заг. ред. І.П. Копилова і Б.К. Клокова.- М .: Вища школа. 1988р. 3 Стандарт підприємства. Загальні вимоги до оформлення пояснювальних записок і креслень. СТП-1-У-НГТУ-98. / НГТУ, Нижній Новгород, 1998 г. |
 Категорія розміщення
Категорія розміщення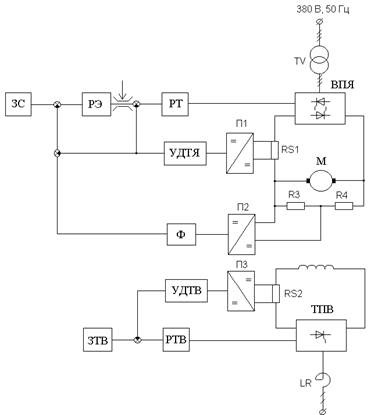
 рад / с. (3.1)
рад / с. (3.1) Ом. (3.2)
Ом. (3.2) В. (3.3)
В. (3.3) , (3.4)
, (3.4) - число витків обмотки якоря,
- число витків обмотки якоря,  вс / рад.(3.5)
вс / рад.(3.5) Вб. (3.6)
Вб. (3.6) Ом. (3.7)
Ом. (3.7) А. (3.8)
А. (3.8) Вб / А, (3.9)
Вб / А, (3.9) визначається по кривій намагнічування [1].
визначається по кривій намагнічування [1]. Гн. (3.10)
Гн. (3.10) с. (3.11)
с. (3.11) с. (3.12)
с. (3.12) Гн, (3.13)
Гн, (3.13) = 0.1 - для компенсованих машин.
= 0.1 - для компенсованих машин. с. (3.14)
с. (3.14) кгм 2. (3.15)
кгм 2. (3.15) кгм 2. (3.16)
кгм 2. (3.16) кгм 2. (3.17)
кгм 2. (3.17) Нм. (3.18)
Нм. (3.18) рад / с 2, (3.19)
рад / с 2, (3.19) Ом. (3.20)
Ом. (3.20) В. (3.21)
В. (3.21) Ом. (3.22)
Ом. (3.22) Ом. (3.23)
Ом. (3.23) Ом. (3.24)
Ом. (3.24) Ом. (3.25)
Ом. (3.25) . 3.26)
. 3.26) Гн. (3.27)
Гн. (3.27) Гн. (3.28)
Гн. (3.28) . (3.29)
. (3.29) с. (3.30)
с. (3.30) с. (3.31)
с. (3.31) Ом. (3.32)
Ом. (3.32) . (3.33)
. (3.33) , (3.34)
, (3.34) . (3.35)
. (3.35) , Ом. (3.36)
, Ом. (3.36) . (3.37)
. (3.37) , (4.1)
, (4.1) , (4.2)
, (4.2) В. (4.5)
В. (4.5) .
. . (4.6)
. (4.6) . (4.8)
. (4.8)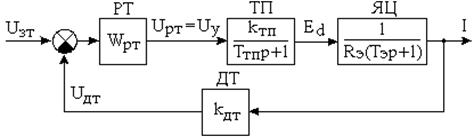
 (5.1.1.1)
(5.1.1.1) . (5.1.1.2)
. (5.1.1.2) , (5.1.1.3)
, (5.1.1.3) , (5.1.1.4)
, (5.1.1.4) (5.1.1.5)
(5.1.1.5) . (5.1.1.6)
. (5.1.1.6) можна знехтувати,
можна знехтувати,  , отримуємо
, отримуємо (5.1.1.7)
(5.1.1.7)



 .(5.1.2.1)
.(5.1.2.1) Ф
Ф
 Ом. (5.1.2.3)
Ом. (5.1.2.3) , вважаємо
, вважаємо 
 Ом. (5.1.2.4)
Ом. (5.1.2.4)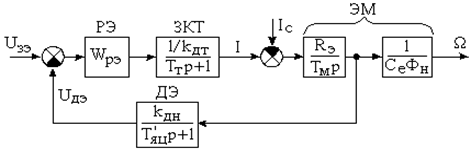
 (5.2.1.1)
(5.2.1.1)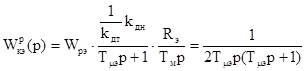 , (5.2.1.3)
, (5.2.1.3) . (5.2.1.4)
. (5.2.1.4) . (5.2.1.5)
. (5.2.1.5) .
. (5.2.1.6)
(5.2.1.6)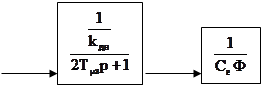



 . (5.2.2.1)
. (5.2.2.1) . (5.2.2.2)
. (5.2.2.2) якщо R I дн = R II дн = 0,5 ∙ R дн, то
якщо R I дн = R II дн = 0,5 ∙ R дн, то  .
. Ом. (5.2.2.3)
Ом. (5.2.2.3) (5.2.2.4)
(5.2.2.4) = 129.3 кОм. (5.2.2.5)
= 129.3 кОм. (5.2.2.5) , I зе = I дн, тобто U зе max = U дн max = 10 В, отже
, I зе = I дн, тобто U зе max = U дн max = 10 В, отже якщо R I зе = R II зе = 0,5 ∙ R зе, то
якщо R I зе = R II зе = 0,5 ∙ R зе, то  .
. .
. кОм. (5.2.2.7)
кОм. (5.2.2.7) . Вважаючи k пр = 1 і приймаючи R 3 = 1 кОм, висловлюю R 4
. Вважаючи k пр = 1 і приймаючи R 3 = 1 кОм, висловлюю R 4 кОм. (5.2.2.8)
кОм. (5.2.2.8)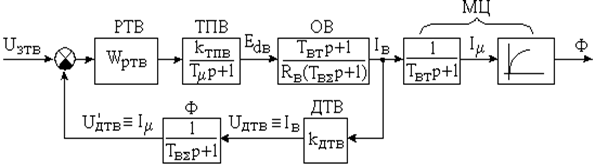
 . (6.1.1)
. (6.1.1) , (6.1.2)
, (6.1.2)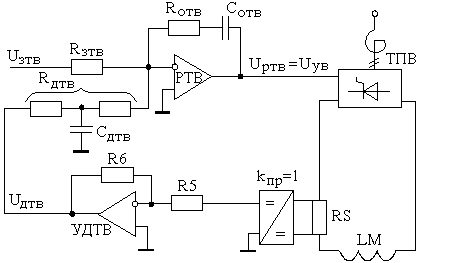
 , (6.2.1)
, (6.2.1) В. (6.2.2)
В. (6.2.2) . (6.2.3)
. (6.2.3) . (6.2.4)
. (6.2.4) . (6.2.5)
. (6.2.5) , (6.2.6)
, (6.2.6) кОм. (6.2.8)
кОм. (6.2.8) ∙
∙  = 321.2 кОм. (6.2.9)
= 321.2 кОм. (6.2.9) кОм. (6.2.10)
кОм. (6.2.10) кОм. (6.2.11)
кОм. (6.2.11) рад / с. (7.2)
рад / с. (7.2) рад / с. (7.3)
рад / с. (7.3) рад / с. (7.4)
рад / с. (7.4) рад / с. (7.5)
рад / с. (7.5)





 . (7.6)
. (7.6) . (7.7)
. (7.7) . (7.8)
. (7.8)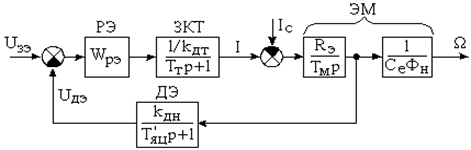
 . (8.1)
. (8.1) . (8.2)
. (8.2)
 . (8.3)
. (8.3) . (8.4)
. (8.4) . (8.5)
. (8.5)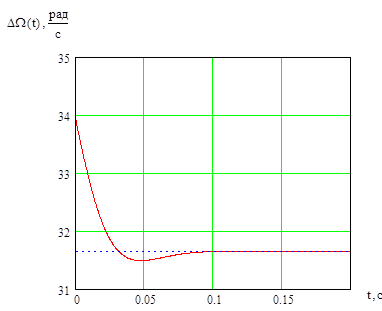
 . (9.1)
. (9.1)
 . (9.4)
. (9.4)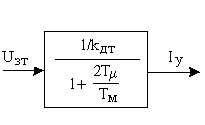
 , (9.5)
, (9.5) (9.6)
(9.6) . (9.7)
. (9.7)